|
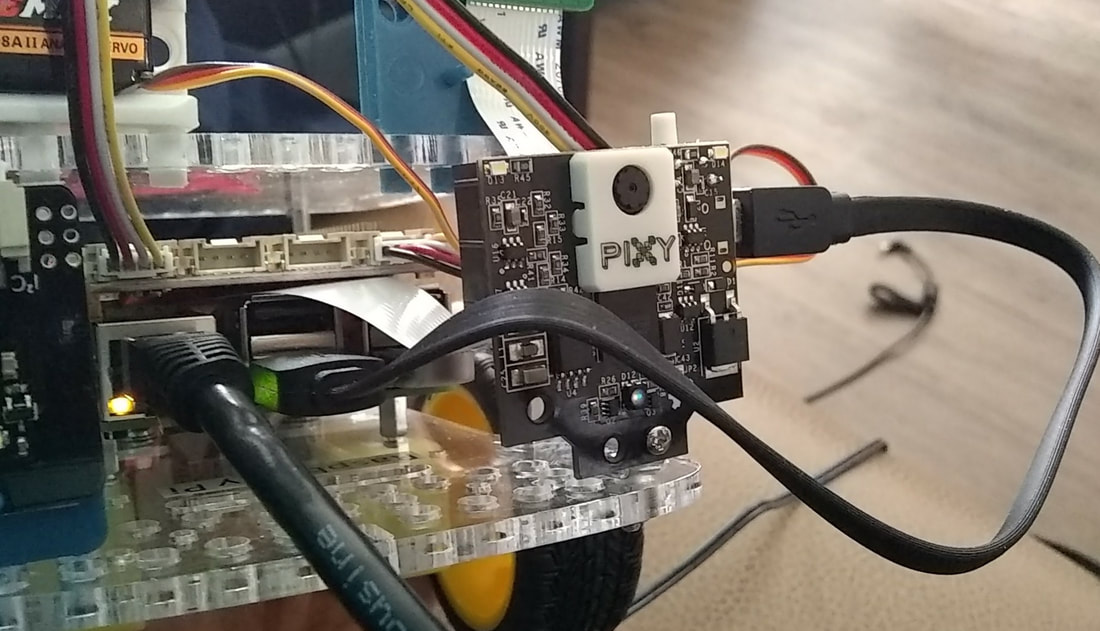
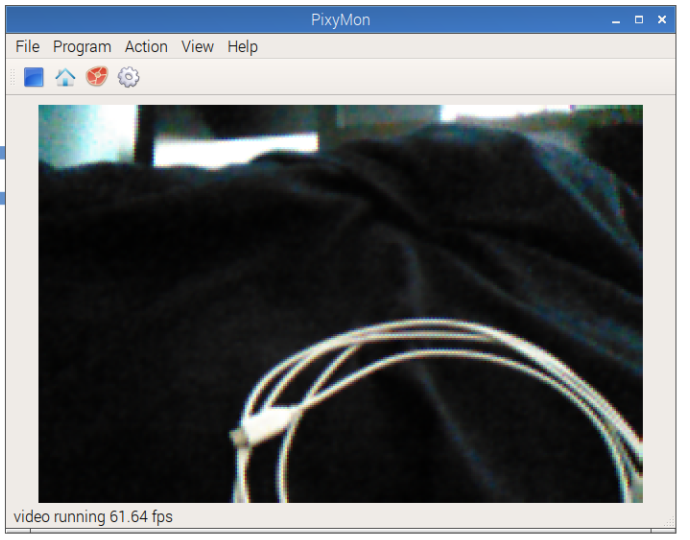
As a potentially easier alternative to TensorFlow, we decided to try out the Pixy2 camera. This camera has built-in object recognition, similar to TensorFlow, using color. The PiWars "toys" and "fish tank" can be colored objects, set inside a white arena, so identifying them should be doable. I attached the Pixy2 PCB to the front of the Dexter robot, and plugged it into the Pi via USB. The LED on the Pixy2 turned on, and I followed the provided instructions to install the Pixy2 driver libraries and dependencies. I tried running the provided test program, but pixy.init() failed, suggesting that the camera wasn't connected properly. The provided PixyMon application can be used to auto-detect the USB Pixy2. I tried connecting the Pixy2 to PixyMon on my computer, and it still failed. I then tried swapping out the USB wire, and the camera connected! -Colin
Comments are closed.
|
AuthorCNM HackerSpace Robotics Archives
December 2020
Categories |
- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information

- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information
 RSS Feed
RSS Feed