|
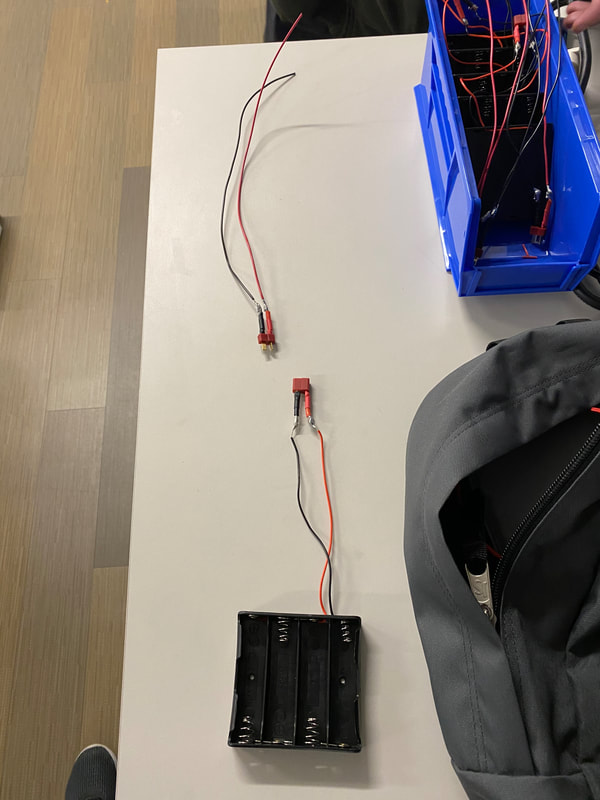
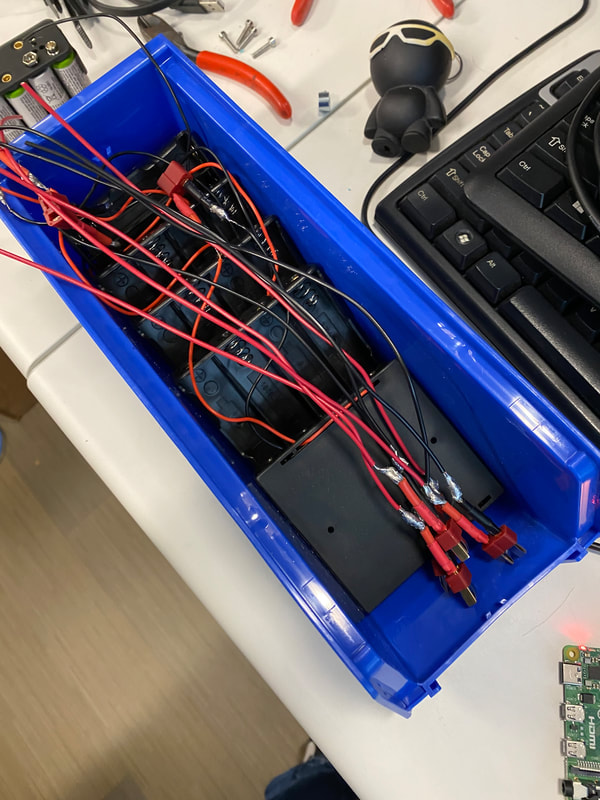
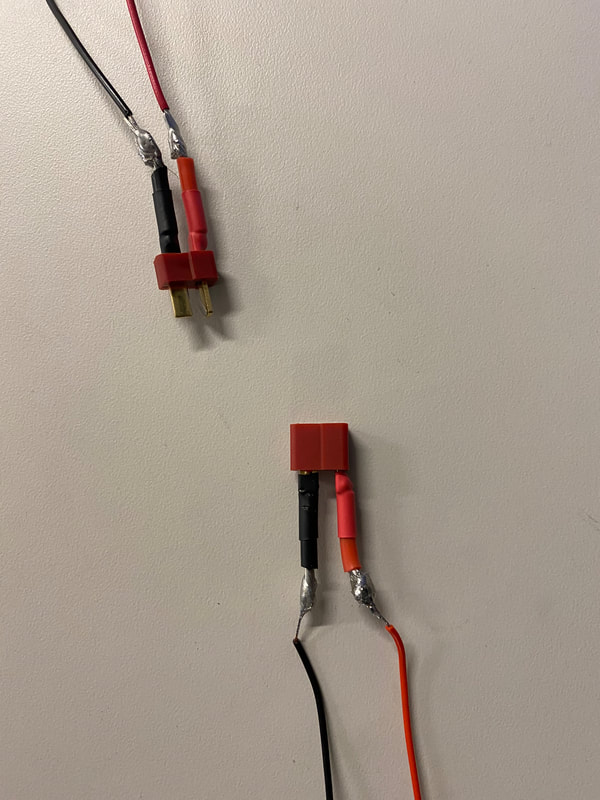
By Daniel Brown This year one of our biggest concerns was maintaining constant power for our robot. In the past we have used rechargeable AA batteries that on several occasions lost too much juice to maintain the robot for the duration of a challenge or would bounce around in the chassis and randomly disconnect during a Pi-Noon battle... So a big part of our early testing this year was in changing out the power plant for Hal 4k. After testing our prototype 18650 battery setup, we ordered more battery trays and new batteries. We now have 4 ready to go battery trays, and 2 spares! We also have a total of 12 18650 batteries now. If Pi-Wars 2020 goes as planned (I’ve been told Pi-Wars NEVER goes as planned), we should not even need to swap out a battery pack, let alone either of the spares we plan to have with us… Compared to last year, this is a major improvement considering the team almost lost power mid challenge in 2019 and had to recharge mid challenge multiple times. In the process of finalizing our battery setup, I learned how to solder (big thanks to Rob Garner, one of the programming instructors on campus here at CNM and a mentor here in HackerSpace for soldering lessons!). Below are some photos of our battery setup mid-completion. They still need shrink wrap and the wiring will need to be measured, trimmed, and cleaned up. This time next week, we should have enough powaah to jump start other teams robots if need be. ;)
BATTERY TESTING & UPGRADES!
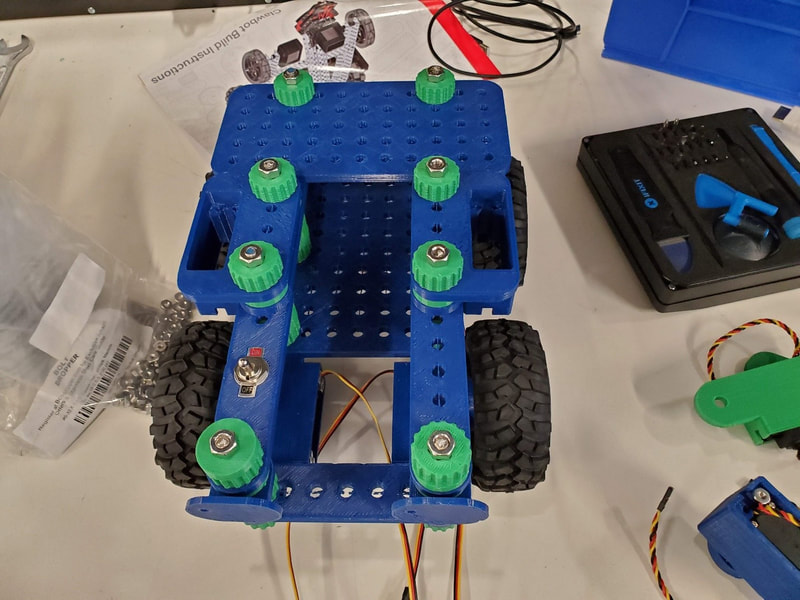
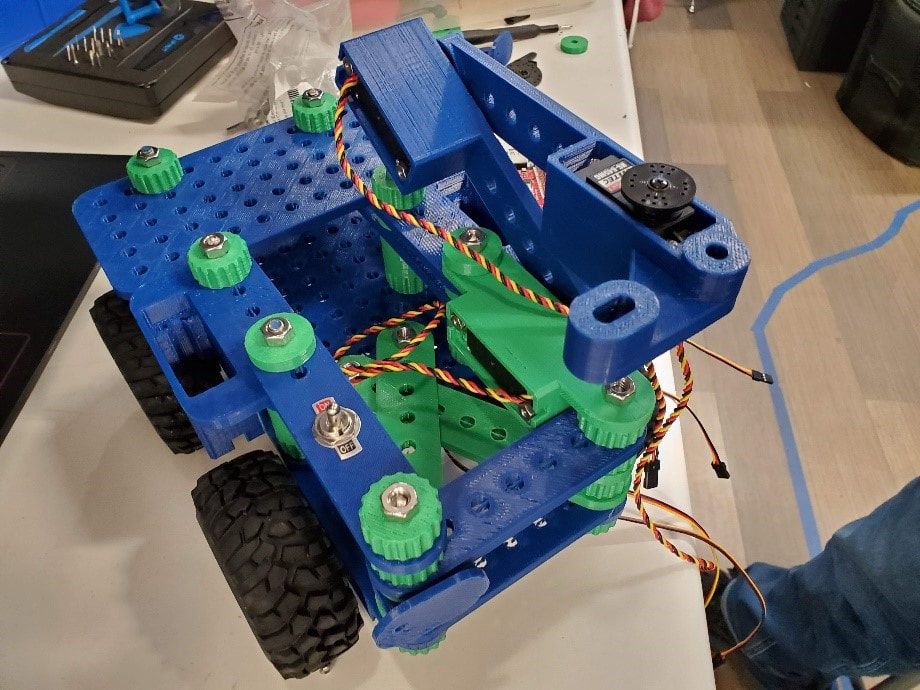
By Daniel Brown After joining CNM Hackerspace to work on the Hal 4K for Pi-Wars I was disappointed in two things about the Hal 3000: it didn’t handle very well (like an RC car would) and the battery life was miserable. After testing the motors at 100% capacity, the battery life was about 11 minutes. The handling was poor due to a high center of gravity, and a majority of the weight being biased towards the front of the body (and above the front wheels). Based on my experience in building RC cars and powering high powered flashlights, I immediately knew that I could be of help in the development of Hal 4K for Pi-Wars 2020. Hal 3000 wasn’t an easy bot to control, mainly because the Raspberry Pi 3B was mounted high in the body, and the battery pack was above the front wheels. This biased the weight towards the front, making the rear of the robot very light and therefore hard to control, especially at speed. Just as with a real car, the lower the center of gravity and the closer to a 50/50 front/rear weight bias, the better handling the vehicle will be. With Hal 4K we have mounted the batteries centrally and much lower inside the body. The Raspberry Pi 4 1GB (also a new upgrade for 2020!) is also mounted above the batteries, in a somewhat central location - in an attempt to achieve a nearly perfect 50/50 front/rear weight bias and much lower center of gravity than I discovered that the 2019 CNM Hackerspace Pi-Wars team utilized rechargeable Ni-Mh (Nickel-Metal Hydride) AA batteries for power. These were used in a configuration of 8 AA batteries, providing 1.2V and 2000mAh per battery. These batteries were also worn down, after being recharged well over 250 times! After a few minutes of research on alternative power sources, as a team we decided to go with 18650 lithium-ion rechargeable batteries because they pack such a heavy punch in a rather little package. Each 18650 battery provides us with 3.7V (up from 1.2V), 3000mAh (up from 2000mAh), and 35 amps of power. In terms of available power and battery life, this a HUGE upgrade. While this was not a cheap upgrade, we believe this was money well spent. After testing with our new battery setup, we can run the Raspberry Pi 4 and the motors on Hal 4K at 100% for well over an hour with no noticeable drop in voltage and/or robot performance. This also allows us to expand and experiment in the future using new sensors that previously would have affected performance or battery life further. After we decided on batteries, we had to develop some sort of quick disconnect system to allow us to swap out battery packs on the fly. Instead of incorporating an on/off switch to a hardwired battery pack (swap individual batteries instead of a pack), we wired an inline quick dis-connector, similar to an RC car battery pack. Not only does this allow us to swap battery packs out on the fly in under a minute, this also acts as the on/off switch for the robot. Being my first year participating in Hackerspace and Pi-Wars, I’ve realized that there is a place for everyone on a robotics team (and in robotics in general!) and wish I would’ve done this years ago. I don’t know much about computers, coding, and robots, but I still found a spot on the team and was able to help out. With a few people that can code, one or two that know 3D design, my knowledge in power and RC cars…. Together we can come together and create something bigger than any one of us is capable of alone. By Joey Ferreri Say hello to the Neurobot (or at least what will be the neurobot). This is the second robot for CNM Hackerspace in our PiWars endeavors. The entire chassis and arm are comprised of exclusively 3D printed pieces, and of course, servos, batteries, sensors, and Raspberry Pis sold separately. The original design was created by Nick Grigoriev on Thingiverse, where we printed the parts from, and included no form of assembly instructions, so I have been going purely off the listing photos and eventually got it to a point to where it looked the same. However, it exceeded the robot size limits in the PiWars rules. Since discovering this, we have modified it by rearranging the main base plates and we now have a slimmer, regulation compliant model of the Neurobot. The original design, which is actually the 3rd iteration of the robot, does not include the arm, as seen in the picture above, but rather, it was taken Nick’s 1st version robot, which is many times larger. Fortunately, however, the arm was not too big to be mounted on to this custom design, albeit with a few more modifications than would be without the arm. Speaking of modifications, the entire front of the robot in the original spec was prone to wiggle back and forth. The cross beams were added to prevent that wiggle. That is just one example of the many modifications needed to fit this robot into a competitively sized package. The robot uses a Sparkfun Redboard controller in conjunction with the Pi, to which all the servos are connected to. Personally, this is my first dive into robotics and building a robot, so I’m not going into this with a lot of knowledge or skills related to this. It has certainly been interesting, to say the least. I have had no experience with Raspberry Pis or anything surrounding them, and especially not with using them as robot controllers. Since I began my journey, I have learned many new skills, including, but not limited to soldering and use of multiple power tools in addition learning how competitive robots are built and programmed (theoretically and physically) b. Being able to go to England has certainly been a motivation to make this robot functional and competitive. I’m quite glad to have joined in with the PiWars team this year and get such a hands-on experience, especially with this being my first year.
|
AuthorCNM HackerSpace Robotics Archives
December 2020
Categories |
- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information

- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information



 RSS Feed
RSS Feed