|
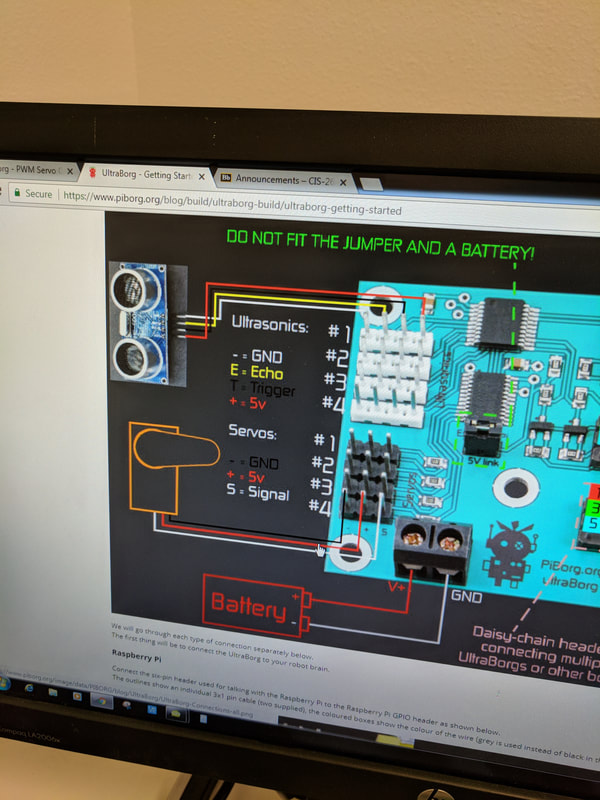
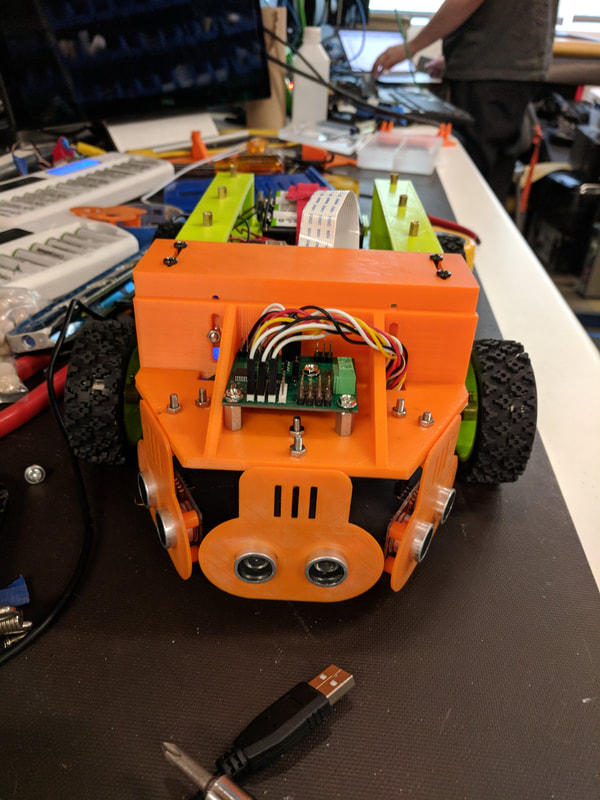
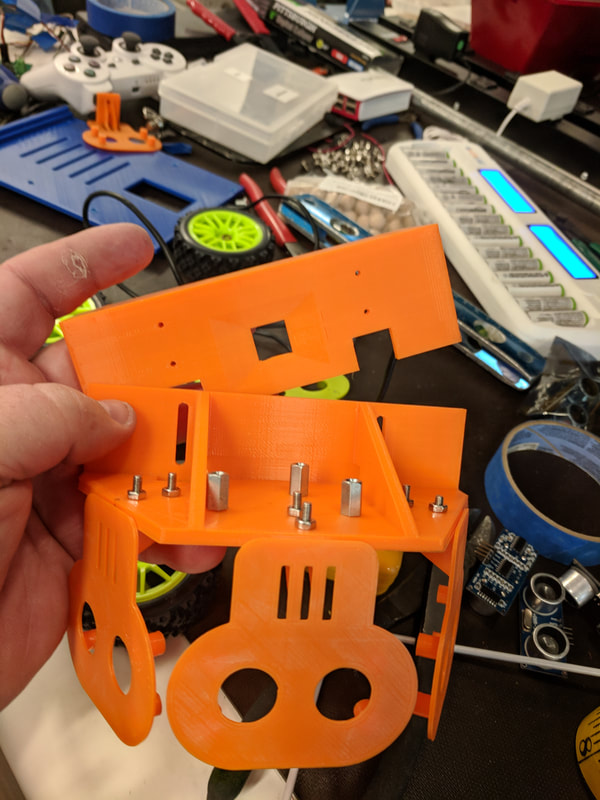
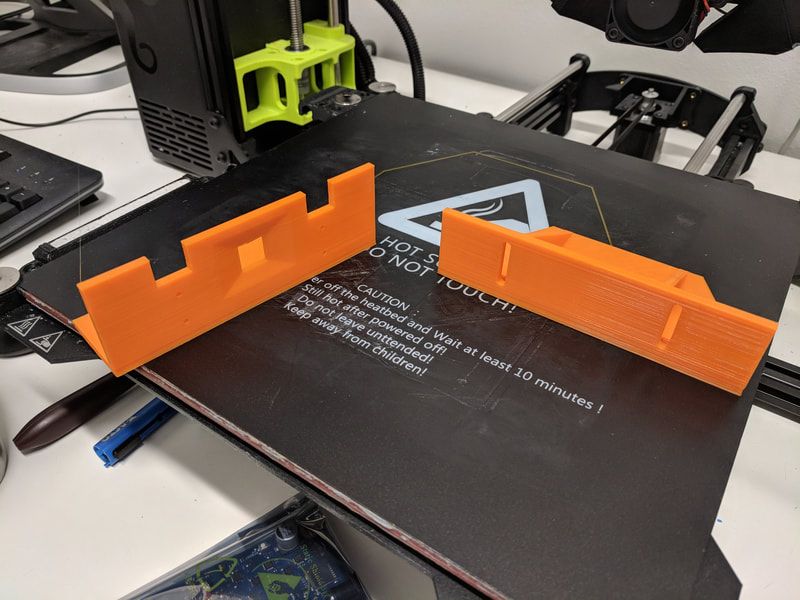
We do love the fact that we have an architect on the team who is becoming quite adept at 3D modeling... and the fact that we have a LulzBot TAZ 6 in the lab! Check them out at www.lulzbot.com. This years robot was built in house based on improvements we wanted to make to last year's robot! Today the new ultrasonic sensor array nose cone came off the printer and right onto the front of HAL 2.0. We are attempting to use this array to navigate the minimal maze. We use a Piborg Ultraborg to collect data from the 3 HC-SR04 Ultrasonic Sensors to gather data and make decisions. The Nose cone is built in 5 pieces: 1. (3) Sonic Punisher Ultrasonic Sensor Mount from Thinigiverse. 2. 2 part in-house designed adjustable nose cone. The sensors are mounted out front of the robot and can be adjusted height wise from dragging on the floor to about 2.5 inches off the ground. Now if we could only get the sensors to read quicker and our logic to work flawlessly... we would be in great shape. At least Hal 2.0 will look cool while we run him ragged around the minimal maze. Videos are pre-nose cone...
Comments are closed.
|
AuthorKerry A. Bruce Archives
April 2018
Categories |
- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information

- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information



 RSS Feed
RSS Feed