|
Such a great adventure! CNM PiWars 2017 Robotics Team: (From Left) Alex Summerlin, Kerry Bruce, Larry Rodriguez, Eric Rector, and James Corriz. 
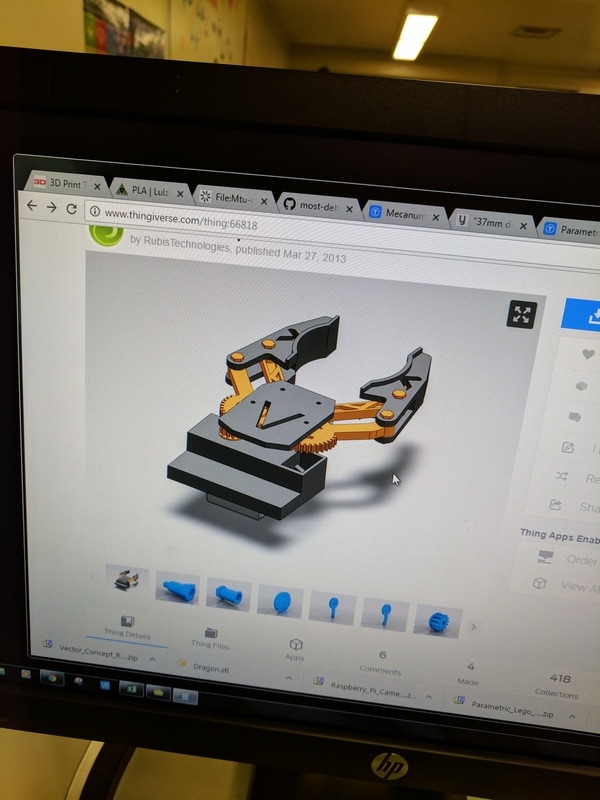
We wanted to share our pictures from #PiWars 2017. Comment and Enjoy! Larry wasn't sure what to do on the plane so I printed him a claw to put together... so we can make an attempt at the Skittles competition.
 HAL getting ready for his first makeover!  HAL wanted highlights...  The hairdresser didn't have any dye foil. :(  Finally ready for the dye, I think he should have went with blonde but he chose black...  First round started! Now to watch paint dry.... Update: had a good chat with HAL, favorite animal is a unicorn...  Looking good! Now for the makeup!  OH NO! They forgot a strip in the back! Not going back to this salon anytime soon... 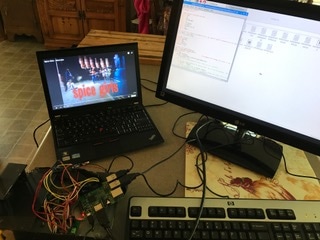 After it was all said and done, we had a good day. Now for relaxing spa time! And yes HAL chose the music...
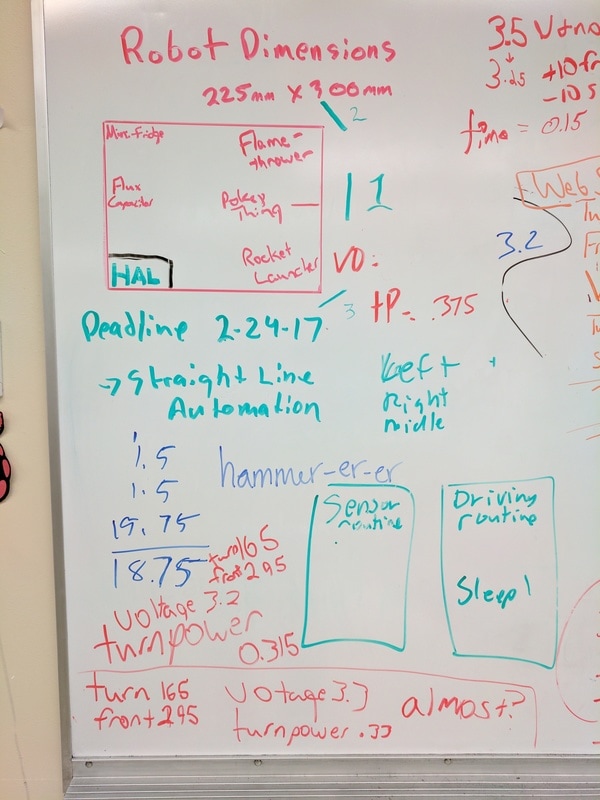
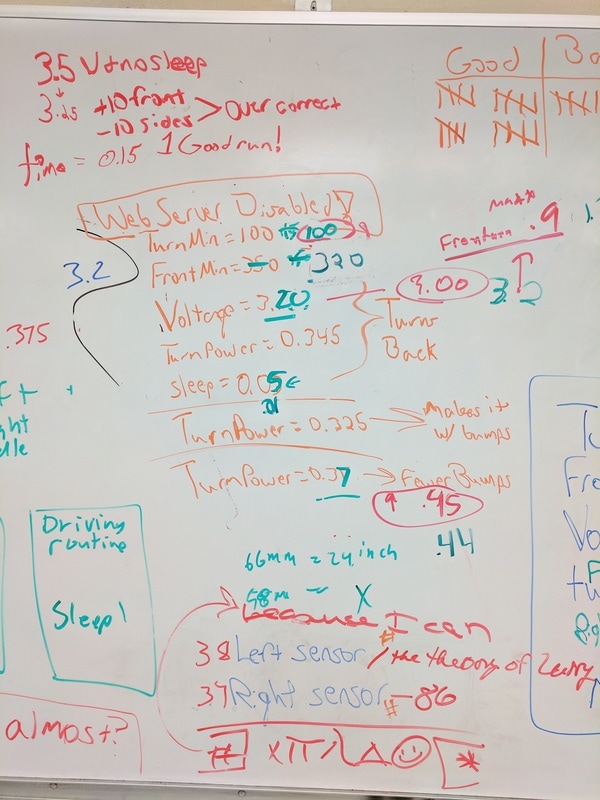
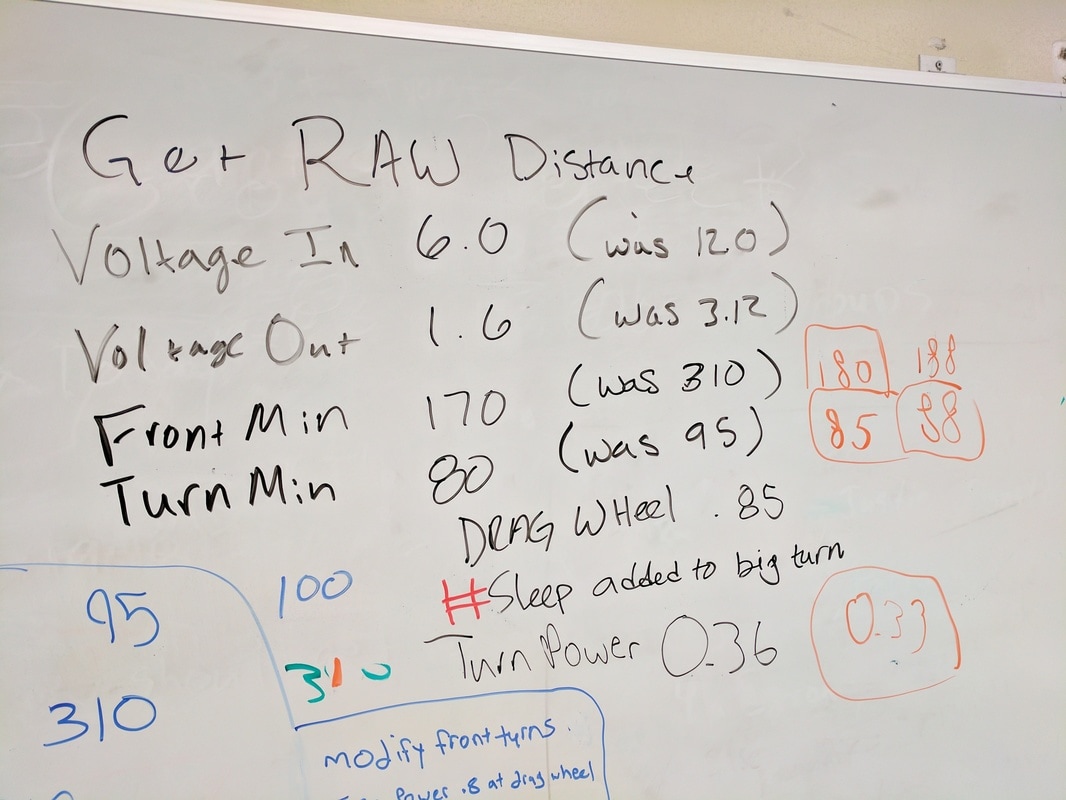
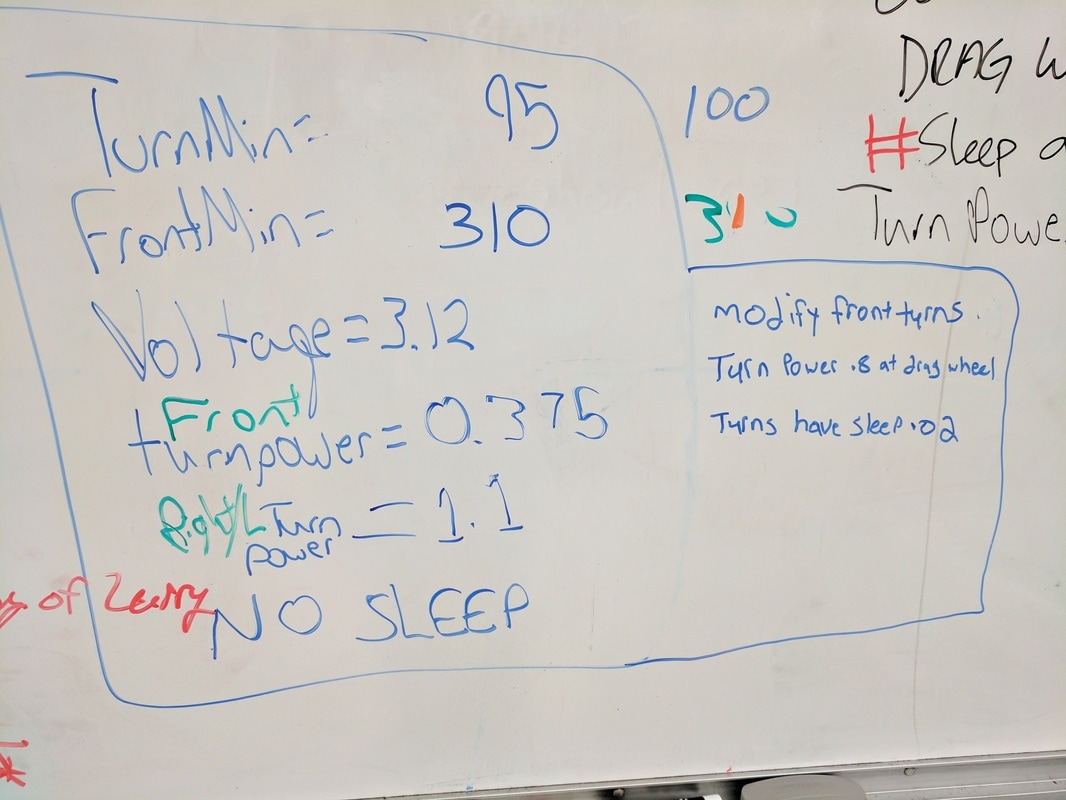
New sensors have arrived and have been installed. Now to see if we can make them work... We'll post video if we can get a successful or semi-successful run. Just going to post our whiteboard notes in case we need them while at #PiWars! So, in order to give HAL enough time and strength to make right/left adjustments on the straight line speed test we inserted a sleep in each of the right/left adjustments followed by an extra roll forward at full strength to avoid our earlier situation of not enough torque to complete a 2nd/3rd right/left adjustment. This results in what we will refer to as "Chatter" during these maneuvers. This combined with a change in the Minimal Maze code to "drag" the inside wheels during certain turn maneuvers has resulted in several of our wheels working their way loose, without us noticing... We are hoping that some of HAL's erratic behaviors these past couple of days is directly related to not have wheels tight and straight during testing. After a quick trip to the hardware store Eric installed a rubber washer to help with vibrations and a lock washer to hopefully keep the wheel tight to the hub. Only the results of test later today will indicate if this has fixed the problem. Note for Larry... Make sure the wheels are tight in between each competition. Larry is the team's primary mechanic. Today he is mounting the PiBorg UltraBorg Sensor Controller to it's permanent location inside the chassis. We use the Ultraborg to power and read out ultrasonic sensors which we use for the 2 autonomous events (Straightline Speed Test and Minimal Maze) Larry's favorite tool is the hammer, and he likes beautiful sunsets and long walks on the beach. Note: The Blue tails out the back end of the robot are the connecting leads for the Line Following Sensors which we are replacing on 3/24/2017. We found the secret sauce... For faster response --- GetRawDistance Being new to this whole robotic thing we sometimes struggle with understanding how everything works together to make the robot successfully navigate the competitions. Our biggest issue was getting the robot to respond to the sensor inputs in a timely manner. IE. Not running straight into a wall, then deciding to turn... It would have been awesome if we had read this comment in the provided code to get sensor inputs faster by using GetRawDistance() instead of GetDistance() way earlier in the process. This one change turned our robot from a drunken sailor bouncing off every wall it could find, to an occasional bump or scrape and 4-6 hours of headaches into 2 hours of headaches tweaking the power and turn settings for optimal performance. 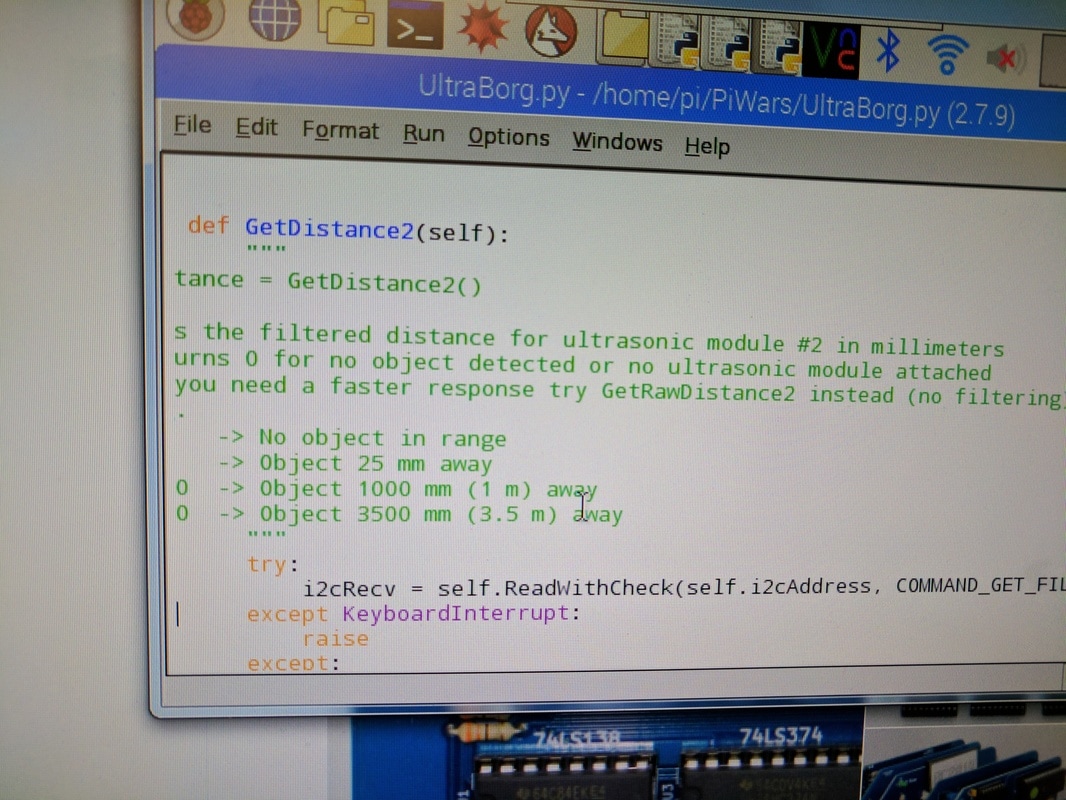 The New Mexico State Tourism Department gave me 100 New Mexico Flag Pins to give out at #PiWars. Track me down and I will give you one! Until I run out of course... We only have 2 sensors... Need more sensors... We feel crippled with just 2 sensors especially since spacing them for such a small line is proving difficult. After spending several hours adjusting code, adding electrical tape to the course, which we borrowed from RoboRave International, (https://roborave.org/) Thanks Russ Fisher-Ives!!! We decided to step back from the line following problem, but additional sensors, so we can run 3, and wait until they arrive on 3/25/2017. Nothing like waiting to the last minute to work out a competition we have never tried before! Go Team! First obstacle: The line on the mat is closer to 14mm than the 15mm we need. Second obstacle: Our sensors are slightly too far apart. Third obstacle: Completely forgot two lines of code that actually make the robot move. Fourth obstacle: Working out the logic and the numbers. Soooo... how about that maze again? -Alex 3D Printed Mecanum Wheels with our brand new Lulzbot Taz 6 3D Printer. We got a Lulzbot Taz 6 3D Printer for HackerSpace and we went a little crazy... these pictures are of the parts for some mecanum wheels for the robot. Check out recent twitter post from @davejavupride to see an awesome example of what these wheels can do. Our Chassis is a little too wide for us to fit these wheels properly within the required footprint so we will have to wait until next year to add these to a skinnier version of our robot. If you want to print your own check, out these 2 thingiverse.com web pages for ideas. There are plenty other designs available to try out... https://www.thingiverse.com/thing:641377 http://www.thingiverse.com/thing:2473 Larry didn't get the memo... Well, we didn't actually send a memo, or a tweet, or a text, etc... Should we feel bad about that? Matching shirts, lab coats, and coming soon ... pocket protectors! -Alex  We build robots, and we know things. -Alex At least that is what we want people to think... We struggle to get this robot to navigate the maze...again... HAL seems to have a mind of his own. We tune the code over and over, when HAL completes the challenge as expected or close to it, we celebrate and run the challenge again. After 6-10 solid runs we feel great and move on... The next day, we set HAL down with the exact same code from the day before and nothing works the way it did yesterday!!! How frustrating is that... We tune, again... HAL finally completes the challenge again, we celebrate! We move on... Next day is the same as the day before... It is like the Bill Murray movie Groundhog Day. I hope we figure this out before we get to England for #PiWars!
March 2017 Adjusted the logic and got fantastic results. 3.5 - 4 seconds time improvement Significantly better adjustments to stay off the walls New straight rails. Thinking through the logic Writing legibly on a white board is a challenge all on its own. -Alex I don't know what you are talking about... That is clearly a 4 and not a 9... We have raised over $5300.00 to help cover the cost of the trip from Albuquerque, NM to Cambridge, UK! Thanks to the following!!! Direct Donations from Friends, Family, Students, and Staff CNM Executive Council of Students Mr. Car Wash Ticket Sales Panda Express Lunch Kelly Jo's Design By Wine - Stormtrooper Painting Night We will be holding a GoodWill Donation DropOff Event on April 15th to get started on raising money for next year's competition! We'd like to share our pain... Here is our collection of early attempts to get HAL through our warped maze. None of the team members have ever tried to code something like this before and the learning curve was pretty steep as we kinda jumped into the deep end of the pool before learning how to swim. We may actually know what we are doing by the time PiWars 2018 comes around.
Our HackerSpace is usually as messy as this video shows and that is probably how it should be. There is always something going on and it's really hard to put everything away when a we have to leave knowing that we will be back at it as soon as we get a chance. It is extra messy this semester as the #PiWars robotics team has taken over the front work space until we return from #PiWars. This semester we have added 3D Printing to HackerSpace to go along with our student built CNC machine. We are currently printing parts for 2 additional Delta Most 3D Printers for fabrication purposes. Students are gearing up to build a 3D Laser Scanner for the space over the summer as well. Now if we could find a self-filtering Laser Cutter we would be ready to construct MOST of the parts for our next #PiWars Robot. These are pictures from about midway through the build, programming and testing of HAL for #PiWars 2017. We built HAL out of a metal case from a DVD-ROM drive we removed from a broken computer in HackerSpace. Most of the remaining parts have been or will be scavenged from old PCs to create a "Mad Max" looking robot for the competition. First attempt...Fail! Second Attempt...Success! Third Attempt...Fail! Fourth Attempt...Your guess is as good as mine... So many attempts, so many different results. HAL getting confused and spinning in circles is as hilarious as it is frustrating. -Alex |
AuthorThe hope is this will be a team blog that members of the CNM HackerSpace Robotics Team will contribute too. Archives
April 2018
Categories |
- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information

- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information

 RSS Feed
RSS Feed