|
We found the secret sauce... For faster response --- GetRawDistance Being new to this whole robotic thing we sometimes struggle with understanding how everything works together to make the robot successfully navigate the competitions. Our biggest issue was getting the robot to respond to the sensor inputs in a timely manner. IE. Not running straight into a wall, then deciding to turn... It would have been awesome if we had read this comment in the provided code to get sensor inputs faster by using GetRawDistance() instead of GetDistance() way earlier in the process. This one change turned our robot from a drunken sailor bouncing off every wall it could find, to an occasional bump or scrape and 4-6 hours of headaches into 2 hours of headaches tweaking the power and turn settings for optimal performance. 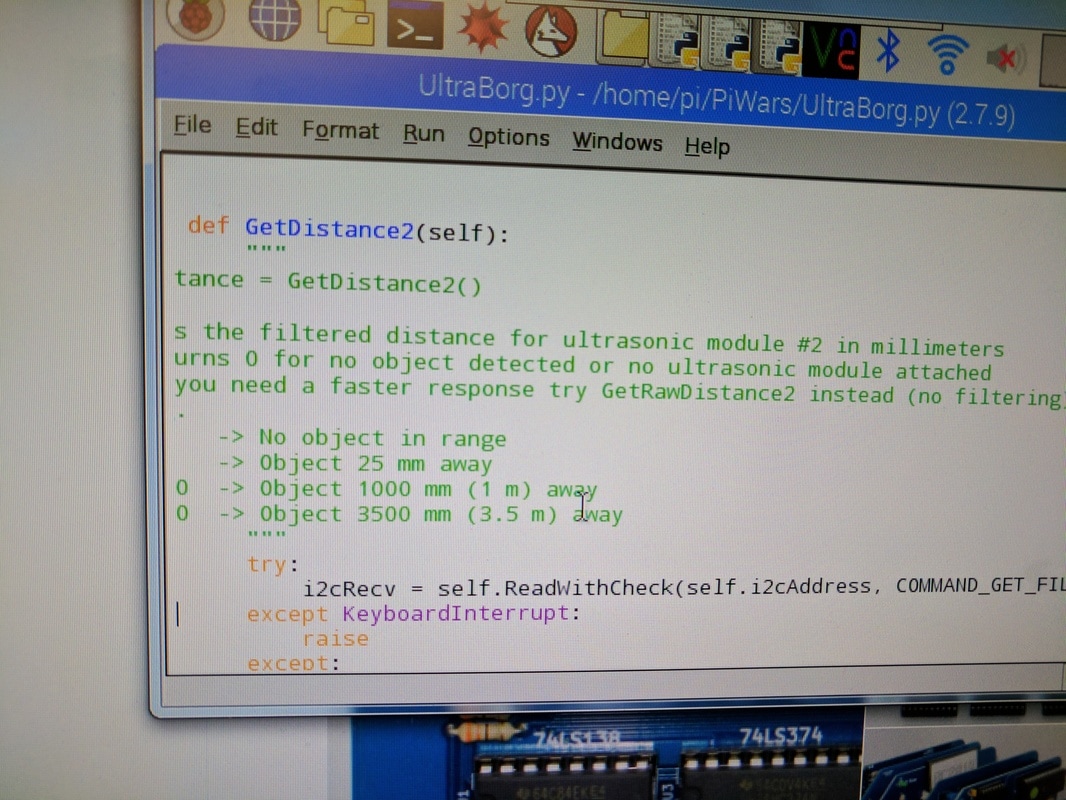 Comments are closed.
|
AuthorThe hope is this will be a team blog that members of the CNM HackerSpace Robotics Team will contribute too. Archives
April 2018
Categories |
- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information

- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information
 RSS Feed
RSS Feed