|
By Jimmy Alexander Eco Disaster is probably one of the most mind-boggling challenges of PiWars yet (not counting the maze but that’s just my personal hatred of mazes). I have started working on the code for that challenge and was able to quickly get the robot to travel to the correct zones. That was no issue at all after the headache of last years nebula challenge. The next step was to find barrels. That shouldn’t be an issue I thought. WRONG. Even though it could find the barrel just fine using the pixy2 (and even when there were no zones behind the barrels), when the robot was in the course with the zones it acted like the barrel wasn’t there. Turns out it was just a minor issue in the code shown below. Not valid Bonus points for anyone who can comment what the issue was. After a quick fix we were back at a point where we could start continuing with our programming when we ran out of time for the day. Hopefully we can give an update tomorrow with a robot bringing barrels to zones. if count > 0 and blocks[0].m_signature ==cur_sig: print 'frame %3d:' % (frame) frame = frame + 1 for index in range (0, 1): print '[BLOCK: SIG=%d X=%3d Y=%3d WIDTH=%3d HEIGHT=%3d]' % (blocks[0].m_signature,blocks[index].m_x,blocks[index].m_y, blocks[index].m_width, blocks[index].m_height) #PerformSpin(12)  Figure 1 Practicing for the driving portion of the competition just in case automation doesnt work
By Jimmy Alexander 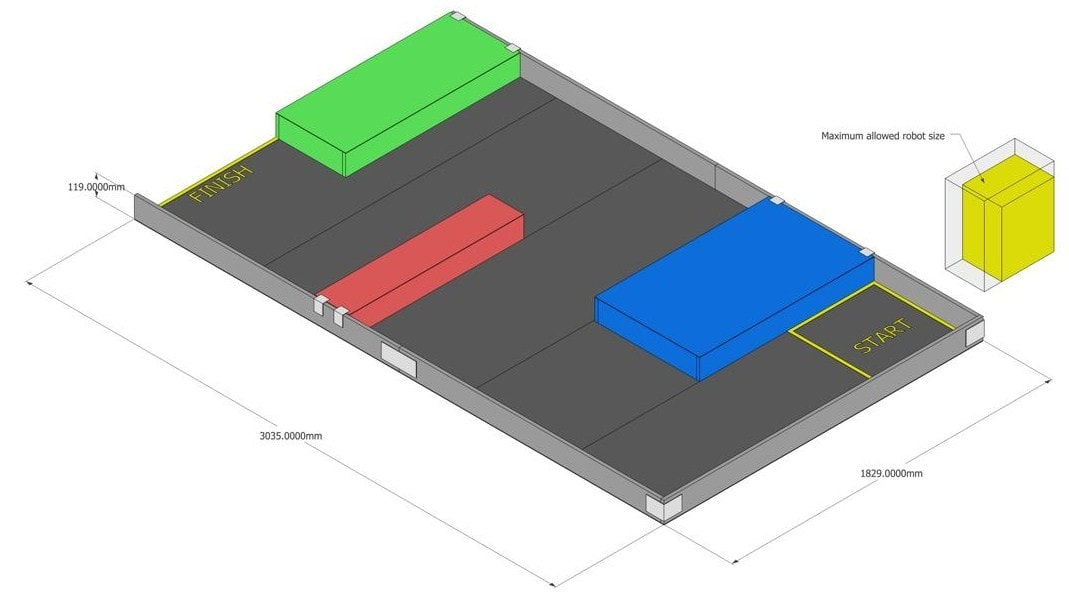 Introduction and Background: PiWars is an annual international robotics competition located in Cambridge, England taking place on March 29th, 2020. CNM Hackerspace is a college organization at Central New Mexico Community College (CNM) ran by students with limited funding. This is CNM Hackerspace’s fourth year competing in PiWars. Each year the biggest problem CNM’s robotics team faces is the maze in any form. In the 2020 competition the maze has been the biggest struggle pushing the team back points wise. CNM Hackerspace must come up with a solution that maximizes the points earned while working within the limitations of the team. Criteria: As CNM Hackerspace is ran by students, its funding is limited to what can be raised by fundraising efforts. In addition, the team is filled with students that have limited time and energy to solve the problems and challenges that may come in a robotics competition. The solution to the escape route maze must be able to gain points while staying within both monetary and time limitations.
Fully Autonomous:
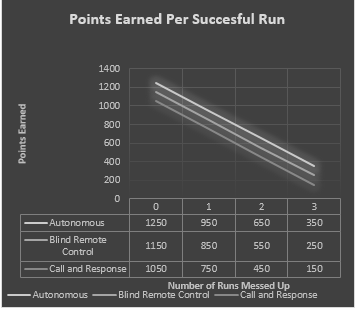
Going the fully autonomous route would allow the robot to gain the most amount of points. Just competing in this method would reward the robot with 350 points. The biggest problem with autonomous robots is the fact that autonomy is very unreliable. As it is unreliable, there is a large chance that not all runs will be successfully completed. There are also larger costs involved as purchases of sensors and control boards would be required. Sensors would also require the robot to run at a slower speed in order to process the input in time to solve the maze. Blind Remote-Control: Going with the blind remote-control method of solving the maze would require a camera, a remote control, and lots of practice. The team has already used a camera and remote-control in previous challenges so that expense has already been accounted for. Going this route would result in 250 base points and be more reliable then the autonomous method of control. Call and Response: The third and final possible method would be the call and response method. This is the least reliable as moving the robot without looking at the robot would cause it to be hard to tell how far the robot has moved. This method also gives the least amount of points at 150. Recommendation and Conclusion: Based on the accuracy of sensors and unreliability of code, I believe the best method to use would be the blind remote-control method. It is much more likely for the maze to mess up with autonomous then with a camera and a person guiding the robot. Since it is unlikely a remote controlled version of the robot will mess up, it would receive more points then even one failure of autonomous code. ReferencesHorne, M., & Richardson, T. (2020). Escape Route. Retrieved from piwars: https://piwars.org/2020-competition/challenges/escape-route/ |
Photo by Rock'n Roll Monkey on Unsplash
AuthorWrite something about yourself. No need to be fancy, just an overview. Archives
March 2020
Categories |
- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information

- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information
 RSS Feed
RSS Feed