|
#Piwars2019 is just minutes away....well more like less than 3 weeks and an 18 hour flight away...but that's not the point. The trip is almost here!!!!
Here are today's goals: -Review the rules -Get new chassis completely functional -Map out remaining items to get completed Lets get going!!!!! One of the biggest differences that has been made between this year and last year is how we are handling image recognization. Last year we used opencv but this year we invested in a $60 pixy2 camera. With this camera it took us only one 3 hour session to get line following working. With the base line following that was created, we adapted that and changed the vector data that was given into bloc data. From this we were able to get the nebula challenge prototyped in only one 3 hour session. We used similar methods from the nebula challenge and were able to get a semihardcoded version of the maze done in one session. Although we do have prototypes of all three automatic challenges done, we are hard at work improving all 3 of them. For the line following we recruited fellow student Jack (Who has helped us throughout our build) and he was able to refine our code into much more consistent results. We are currently working on incorporating ultrasonic sensors into out maze algorithm. Jimmy Alexander Head programmer
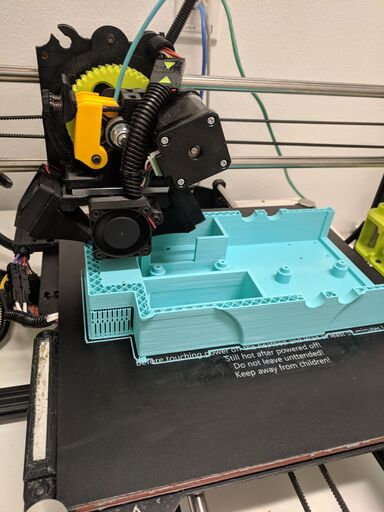
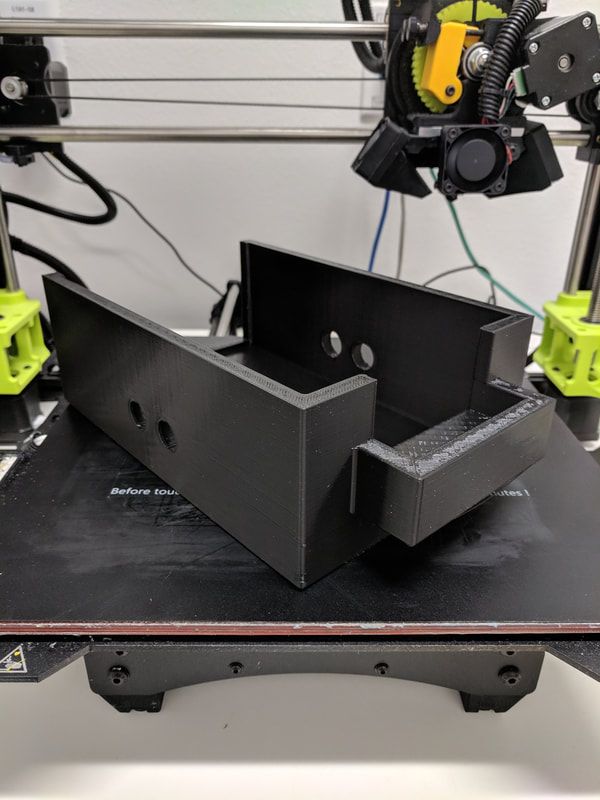
Our chassis is finally printing...soon enough we will be putting it all together! Cant't wait! Paul Judge spent a lot of time designing the new look. He put a lot of effort into learning how to 3D design and then put his skills to the test with designing the new chassis. Our maze is built and being tested as we speak!!!! Videos and photos coming soon!!!!!  We have a proper mount for the pixy cam don't worry....This is a throwback to a couple weeks ago. Note the awesome duct tape work!  Another quick run of the Hubble Telescope Nebula Challenge!!! This time with a whole new set up...we actually have the painted platforms with what we can only hope is close to the British Standards!!! We had a couple issues when we were getting the camera to calibrate to the colors...for some reason it didn't like yellow. After we got it to work the way we wanted. We decided to adjust the camera at a different angle , in doing so Dalton reset the camera and we had to start all over again....I think we are done for the night!!! Unfortunately the team had to cancel the Tuesday meeting due to snow...However that didn't stop Paul from getting things done! Paul started putting HAL together with the new chassis that he designed. Big thanks to Paul for being talented in 3D design we wouldn't be where we are without your skills!!!! Big Thanks to Mr. Bruce for adjusting our straight line track to become "straight..ish" We've done a lot of test runs and it looks like we are on the right track....WINK WINK. Heres what we've got coming up.
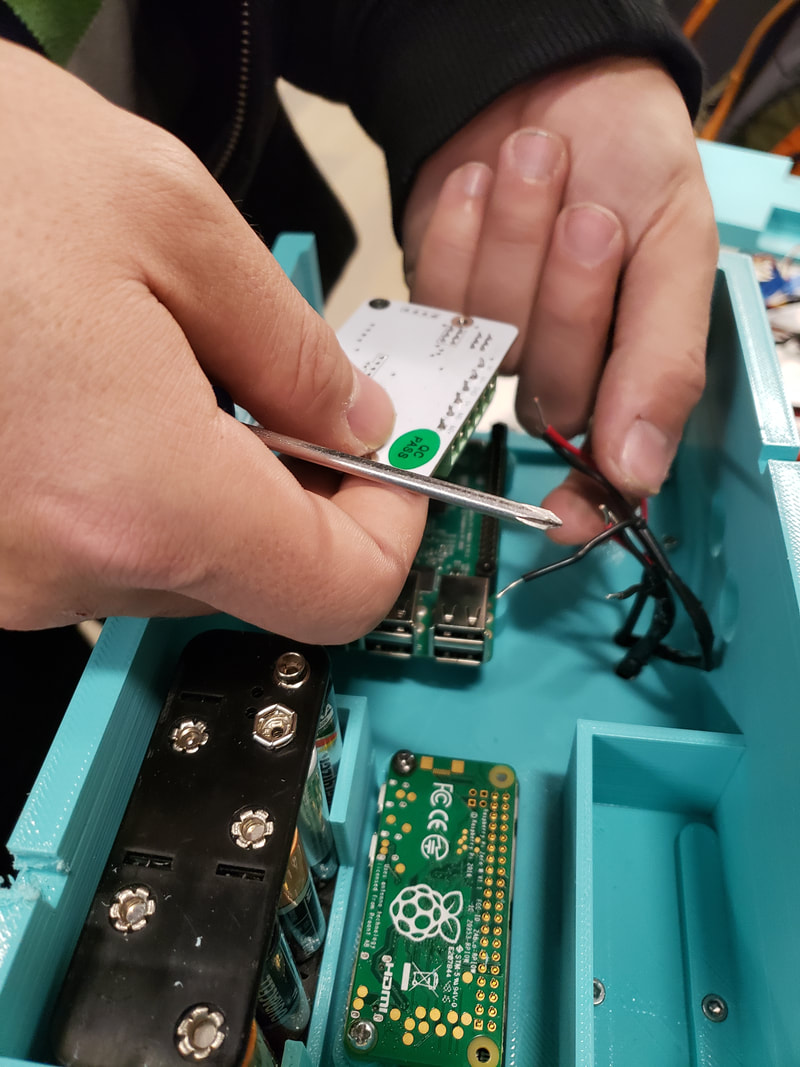
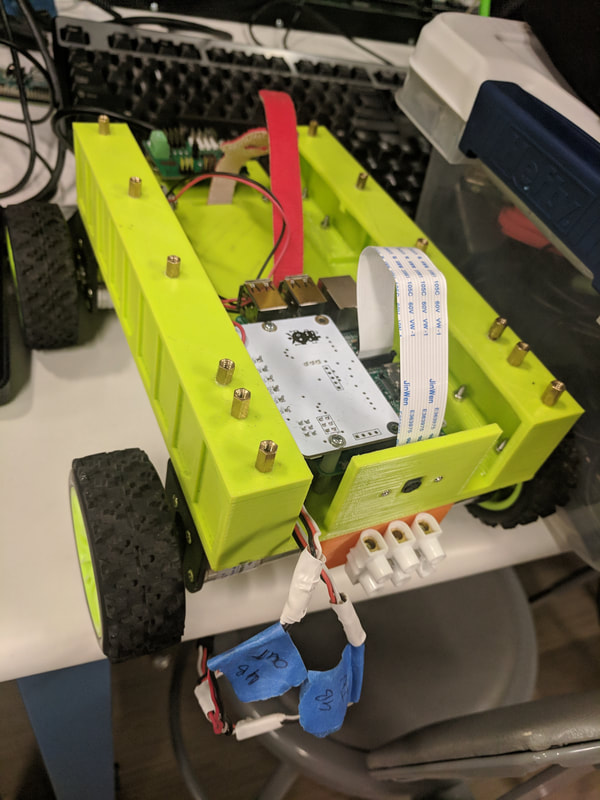
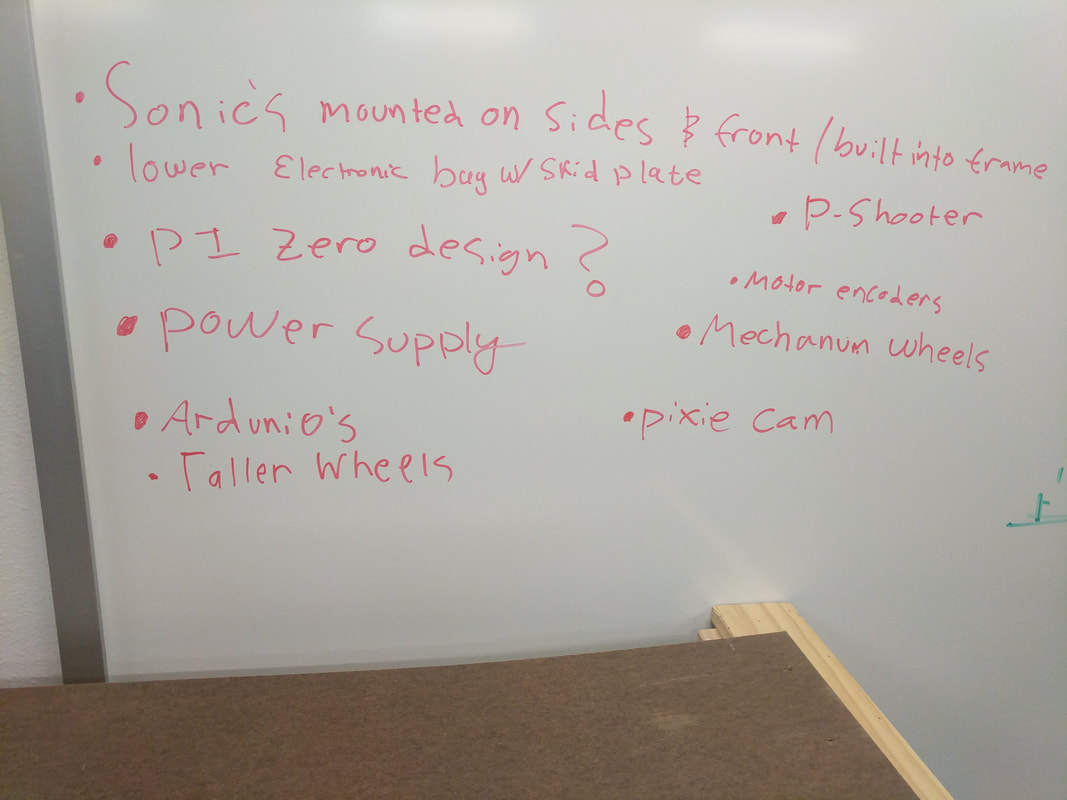
The Hubble Telescope Nebula Challenge test #10.....SUCCESS Just a bit of tinkering from Jimmy and Dalton and we got it to work!!! We are practicing the line challenge today!! super excited with the improvement. We are now waiting for Paul to design a proper mount for the pixy 2 camera. Most importantly, Jimmy spent a lot of time with the coding for this challenge. He started with finding C code from Robokits, he then chose different pieces of the code and translated it to Python..THEN he added it to our previous code from last year in hopes to improve. Great work!!!  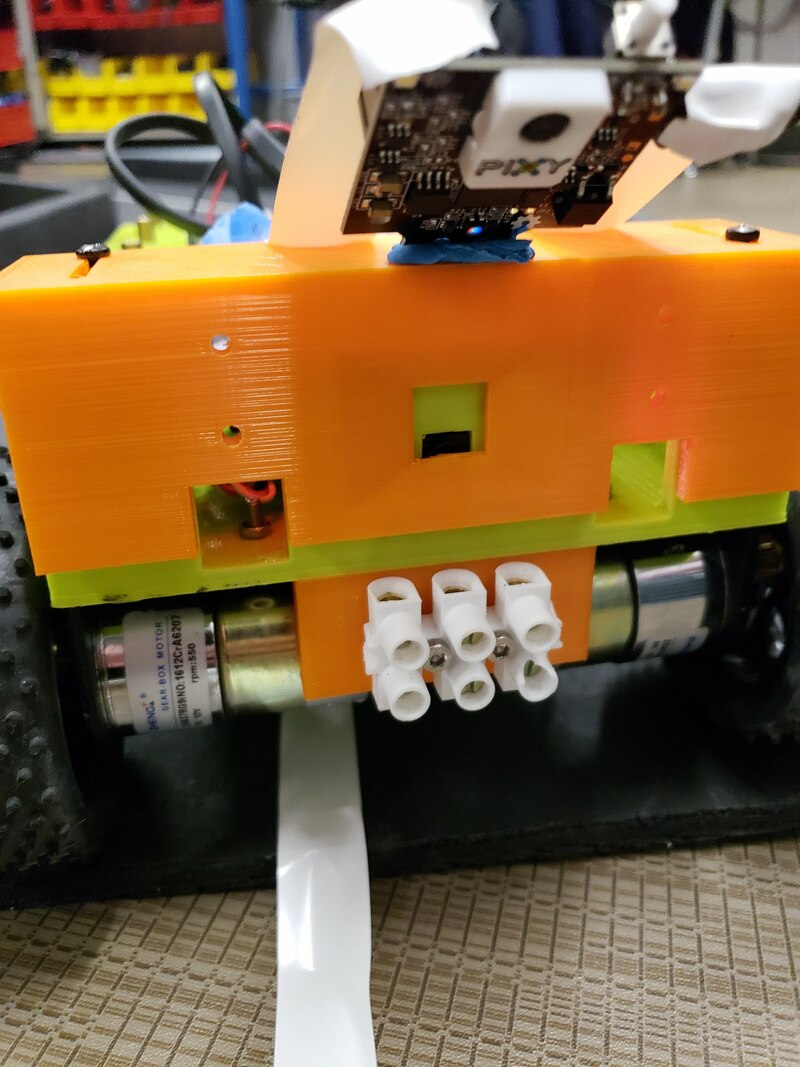 We are two days into the semester and we are ready to take a break from class. Luckily the team is meeting today to work on HAL 3000...More and more modifications are happening and we are getting super excited about the trip. Activities include: -Dalton and Jimmy are debating on whether to use an Arduino for line following. However they have come to the conclusion to go with the raspberry pi (they did not completely veto the Arduino). -Jimmy is converting code from Robokits to python for line following and our pixy cam. - Mr Bruce is Cleaning up our chassis which was 3D printed and designed by Paul -Mr. Bruce is also doing a little bit of recruiting with the class next door. Yeah that's right, back and better than ever. Paul got down into it, as he began using his brain power to come up with the new chassis. How did he do it you might ask? With just a little bit of focusing on strength and a minimalist point of view he was able to come up with the idea. In addition he spent 4 months(realistically-two afternoons of serious hard work) to learn a new software called Fusion 360. Fourteen hours later and 1 kilo of plastic, our chassis was born. Our expected changes -Hard wire mounts Difficulties -forming the design -implementing changes and working creative work around. It’s that time of year again. Jimmy Alexander Here... As CNM students are starting up the 5th week of classes, the Solar Cat’s Team is starting up our now yearly #PiWars Robotics fun! We have started setting up additional meeting times so that we can work on creating the BEST ROBOT EVER!!!!!!! As we are just getting started we do not have a whole lot to update everyone on, but we decided we would give a brief overview of some of the ideas we have come up with so far. Ideas: (NOTE: Some(most) of these ideas will not make it past the planning stage)
Things we plan on keeping from last year’s robot:
|
AuthorMy name is Abigail, I'm a CNM student currently in pursuit of a biology degree. My current role in the team is to clean up/organize the lab, blog/take photos, and I'm one of the drivers for our robot. Daily Quotes and Sayings from the team
Quick links
All
Archives
March 2019
|
- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information

- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information










 RSS Feed
RSS Feed