|
The Hubble Telescope Nebula Challenge test #10.....SUCCESS Just a bit of tinkering from Jimmy and Dalton and we got it to work!!! We are practicing the line challenge today!! super excited with the improvement. We are now waiting for Paul to design a proper mount for the pixy 2 camera. Most importantly, Jimmy spent a lot of time with the coding for this challenge. He started with finding C code from Robokits, he then chose different pieces of the code and translated it to Python..THEN he added it to our previous code from last year in hopes to improve. Great work!!!  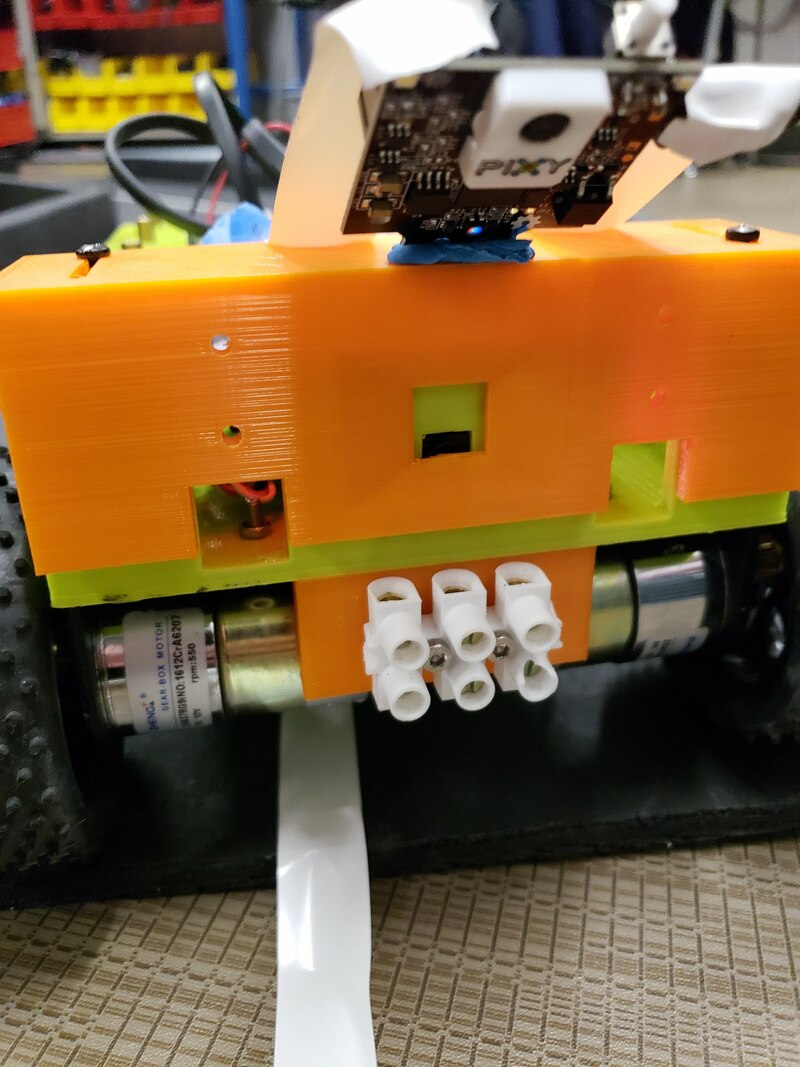 Just a quick update on the travel components. Heres what everyone said...
"Hey guys how are you feeling about the trip and the progress of the robot" Dalton: "I'm super excited" Paul: "I'm super excited" Jimmy: "I'm super excited...slightly worried about the progress." Abby: "I'm super excited. A little bit worried about driving the robot in competition" Kerry: "Just waiting on the response for ECOS and the funding situation. Other than that I'm super excited and a little worried about the progress" Steph: "I'm ecstatic about it, I'm gaining so much experience from this on several fronts. Traveling to another country, traveling by plane, and participating in a technology based competition. They're all firsts for me I'm pretty sure everyone is feeling a bit overwhelmed with the lack of progress but I know with this team we can pull through and get caught up in no time. We are two days into the semester and we are ready to take a break from class. Luckily the team is meeting today to work on HAL 3000...More and more modifications are happening and we are getting super excited about the trip. Activities include: -Dalton and Jimmy are debating on whether to use an Arduino for line following. However they have come to the conclusion to go with the raspberry pi (they did not completely veto the Arduino). -Jimmy is converting code from Robokits to python for line following and our pixy cam. - Mr Bruce is Cleaning up our chassis which was 3D printed and designed by Paul -Mr. Bruce is also doing a little bit of recruiting with the class next door. We are CNM HackerSpace
3rd Generation Robot named HAL3000. A 3D designed and printed wheeled robot named after the computer in 2001: A Space Odyssey. The robot is controlled with a PS3 controller and uses a Pixy2, ultrasonic sensors, and a custom designed/printed “Slingatron” projectile launcher. Programming and robot design build on previous version of our #PiWars robots. The team is a mixed group of 1st/2nd year University students from our Computer Information Systems, Engineering and Biology programs at Central New Mexico Community College (CNM) in Albuquerque, NM. We are excited to be participating in our 3rd year of #PiWars! |
AuthorMy name is Abigail, I'm a CNM student currently in pursuit of a biology degree. My current role in the team is to clean up/organize the lab, blog/take photos, and I'm one of the drivers for our robot. Daily Quotes and Sayings from the team
Quick links
All
Archives
March 2019
|
- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information

- Home
-
My IT Instructor
-
Student Resources
>
-
CNM Courses
>
- CNM - Cisco Self Enroll Courses
- CIS-1410 IT Essentials Hardware
- CIS-1415 Network Essentials
- CIS-1605 Internet of Things
- CIS-1610 IT Essentials Software
- CIS 1696 Introduction to Competitive Robotics
- CIS-2620 Configuring Windows Server
- CIS-2636 Cloud Computing
- CIS-2650 Advanced Windows Server
- CIS-2670 Computer Security+
-
CNM Courses
>
- Instructor Resources >
- NCTC
- Let's Get Social
- Books I Recommend
-
Student Resources
>
- WASTC
- #PiWars Blogs
- Pi IT Up!
- CNM HackerSpace
- Robotics Resources
- Workshop Information

 RSS Feed
RSS Feed